目录
*本文简要介绍了IOL计算的发展过程,并在相应位置附上了便于理解的延伸内容链接。
第一阶段:传统理论公式
1970s
背景
- 人工晶状体刚进入临床
- 生物测量手段有限(早期 A-scan、角膜曲率计)
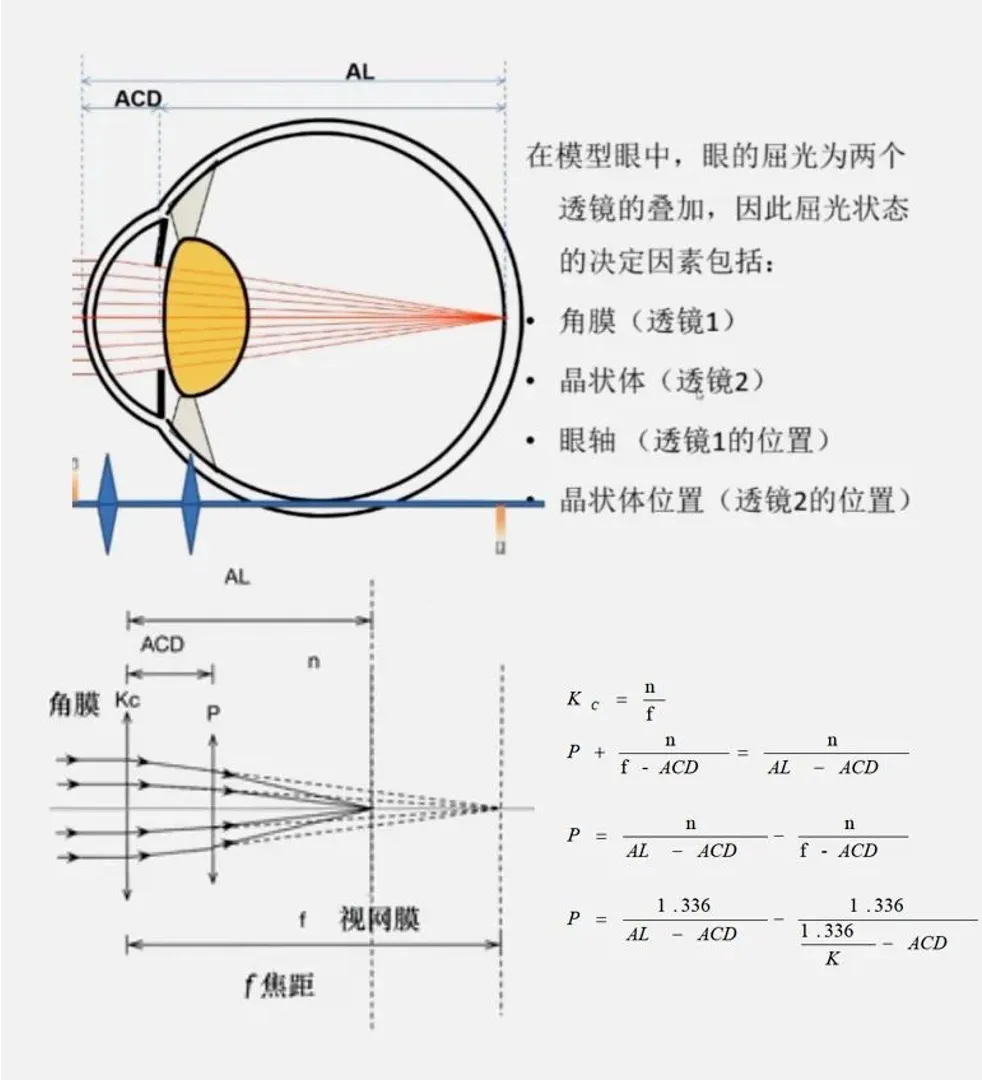
- 研究者尝试用几何光学与近轴理论直接推导 IOL 度数
特征
- 基于光学理论推导
- IOL 被视为薄透镜
- 术后 IOL 位置通常假设为固定或高度简化
代表公式
- Binkhorst formula
- Gills formula
- Clayman formula
- Fyodorov formula
第二阶段:回归公式
1970s–1980s
背景
- 理论公式在临床中误差较大
- 超声测量普及,术后数据快速积累
- 临床转而依赖统计回归方法
核心特征
- 不建立明确的眼光学模型
- 通过回归公式计算
- 依赖A常数(A-constant)
代表公式
- SRK I(1979): 公式:P = A-2.5(L)-0.9(K)
- SRK II(1988):公式:P = A-2.5(L)-0.9(K)(根据眼轴校正A常数)
- L=眼轴长度 K=角膜曲率
第三阶段:薄透镜视差理论公式
1990s
背景
- 前阶段公式计算误差较大
- 重新引入近轴光学与视差理论
核心特征
- 提出 有效人工晶状体位置(ELP) 概念
- IOL 仍视为薄透镜
- ELP 通过理论或经验方法预测
代表公式
- Hoffer Q(1993)
- Holladay 1(1993)
- SRK/T(1994)
👉🏻点击查看[[第三阶段:薄透镜视差理论公式]]详细介绍(一看就懂)
第四阶段:厚透镜 / 多变量理论公式
2000s–2010s
背景
- 生物测量技术成熟
- 认识到 ELP 预测是屈光误差的核心
核心特征
- IOL 被视为厚透镜(具有前后主平面)
- 构建更真实的前节几何模型
- 同时引入多项参数(AL、K、ACD、LT、WTW 等)
代表公式
- Haigis(2000)
- Holladay 2(2003)
- Olsen(2007)
- Barrett Universal II(2010)
👉🏻点击查看[第四阶段:厚透镜多变量理论公式]详细介绍(一看就懂)
第五阶段:人工智能与光线追迹公式
2010s–至今
背景
- 大数据与机器学习进入眼科
- SS-OCT、Scheimpflug 等成像技术成熟
- 屈光手术后白内障病例显著增加
核心特征
- 人工智能公式
- 数据驱动, ELP建模
- 对极端眼轴更准确
- 光线追迹公式
- 不依赖近轴假设
- 基于 Snell 定律构建个体化眼模型
代表公式
- Hill-RBF(2015)
- Kane(2017)
- PEARL-DGS(2019)
- OKULIX(ray tracing)(约 2009)
- SS-OCT–based ray tracing formulas(2020s)
👉🏻点击查看[第五阶段:人工智能与光线追迹公式]详细介绍(一看就懂)